Architecture Overview
This is meant to act as a rough guide and overview of how you should organise your work with STRIPE-kit. Since STRIPE-kit is a library, with modular design at its core, no specifics are provided here. This is essentially an even higher-level overview of the library’s architecture.
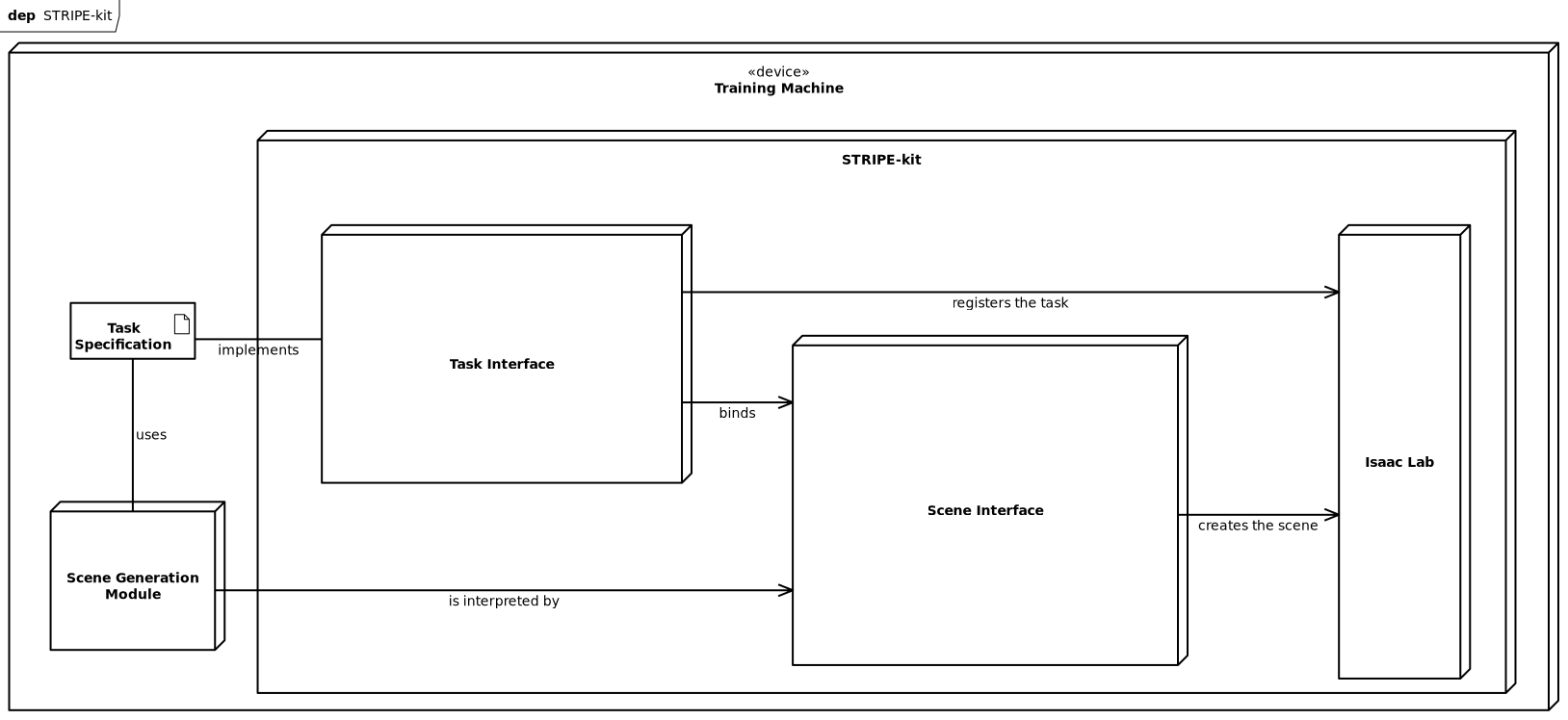
STRIPE-kit general architecture deployment diagram
Project Elements
To use stripe_kit in your project, you need to provide the following elements:
Task specification as
stripe_kit.TrainingSpecScene generation module as
stripe_kit.SceneSpec
For convenience, we advise you keep those separate and generic, so that you can easily switch and reuse them across different projects. Ideally, you can keep them as separate repositories and python modules, as we did during the development of this library.
Technically speaking, stripe_kit.TrainingSpec holds a reference
to stripe_kit.SceneSpec as stripe_kit.TrainingSpec.scene.
Via this reference, the training specification acts as a facade of your project
through which stripe_kit can interact with your project’s scene generation
module.
Consult with Generating Environments guide to learn more how to build these elements.
Internal Flow
Internally, stripe_kit can be separated into two main components of separate functions:
Task Interface
Scene Interface
Task interface is responsible for registering tasks and binding them to a given scene. On the other hand, the scene interface provides tools that allow you to express how your scene should look like.
These two can be used separately to provide a modular and flexible framework for generating scenes and training. To learn more about these specific components, consult with the stripe_kit Module module documentation.
However, for most users, this knowledge is not necessary. You should only keep this in mind, while extending the functionality of the library in your own classes.
Training Machine
You are going to need to find a machine powerful enough to run Nvidia Isaac Lab. That’s a bit of a tall order, since it requires ~100GB of space and at least an RTX 4060, realistically speaking of course.
In our case, we utilized a computing cluster, provided by our faculty, to run the training process. Since having video output out of clusters is usually not possible, we had to resort to using a livestreaming client to visualize scene simulation. You can find more information about this in the Isaac Sim documentation.
For visualizing the training process, Isaac Lab allows you to generate short films every couple of iterations. This is the ideal solution for monitoring the training progress and you can find more information about this in the Isaac Lab documentation.
Showcase
Feel free to explore our codebase, especially beyond the stripe_kit repository. There you can find our scene generation module forest_gen, it should be useful for understanding how to implement your own tasks and scenes.
Be sure to check out sim.py and task.py at forest_gen repo root. They provide a reference of how you can simulate in IsaacLab the generated scene - in case of sim.py, and how to build a task with stripe_kit in case of task.py.
Generally speaking, if you were to wrap task.py in another script, that was to import the exported task_spec, and then registered the spec, you would be 90% there when it comes to training a robot to walk in a forest. You would just have to follow the instructions on how to build a training script